
PID là gì ? Làm cố gắng nào để điều chỉnh thông số kỹ thuật PID ? chúng ta thường dùng cách thức nào đề khẳng định thông số bộ tinh chỉnh này…. Và rất nhiều thông tin có lợi khác như lịch sử dân tộc hình thành, những ký hiệu, ứng dụng… sẽ được chúng tôi chia sẻ trong nội dung bài viết hôm nay. Bạn hãy dành ra một chút thời hạn để tìm kiếm hiểu cụ thể những thông tin dưới dây nhé.
Bạn đang xem: Điều khiển nhiệt độ bằng phương pháp pid
PID là gì ?
PID là viết tắt của từ Proportional Integral Derivative. Hoàn toàn có thể hiểu PID là một cơ chế phản hồi của vòng điều khiển. Được sử dụng ở hầu như các loại thiết bị trang thiết bị công nghiệp. Rất có thể bạn chưa chắc chắn điều khiển PID được sử dụng nhiều duy nhất trong tất cả các loại điều khiển và tinh chỉnh phản hồi.
Theo bạn thì tác dụng của PID là gì ? PID được sử dụng để thống kê giám sát các giá trị sai số. Hiểu dễ dàng và đơn giản thì nó là hiệu số giữa giá trị đo thông số biến hóa và giá trị đặttheo yêu thương cầu. PID Controller sẽ tiến hành giảm buổi tối đa những sai số bằng phương thức điều chỉnh những giá trị sinh hoạt đầu vào.
Cách điều chỉnh thông số bộ điều khiển và tinh chỉnh PID
Trước tiên họ phải xác minh với nhau rằng, kiểm soát và điều chỉnh vòng điều khiển chính là biến đổi các thông số điều hành và kiểm soát của nó ( gồm có: độ lợi/dải tỉ lệ, độ lợi tích/reset, vi phân/tốc độ ) mang lại một mức chi phí trị đáp ứng nhu cầu điều khiển buổi tối ưu của tín đồ dùng.
Để rất có thể điều chỉnh được PID là điều không hẳn dễ dàng. Trong cả khi bạn đã có đầy đầy đủ cả 3 thông số. Nói bởi vậy không tức là không gồm cách mà các phương thức điều chỉnh này thường sẽ rất phức tạp. Dưới đây, Đại Dương có tổng vừa lòng được một vài cách biến hóa theo cách thông thường như sau:
Độ ổn định: Sự không ổn định định thường bởi dư thừa độ lợi đặc biệt khi có lộ diện độ trễ lớn. Muốn dành được độ ổn định cao bạn phải đảm bảo quá trình không xẩy ra dao động.Tối ưu hóa hành vì: Để có thể làm được điều này, bạn nên thay đổi quá trình hoặc vị trí đặt của cỗ điều khiển. Nhị yêu cầu cơ phiên bản của phương pháp này đó là ổn định và tự hiểu chỉnh lệch nó sẽ nhờ vào vào các tiêu chuẩn đặc biệt như: thời gian khởi cồn và thời hạn xác lập. Các quy trình cần buổi tối ưu hóa tích điện bị tiêu hao.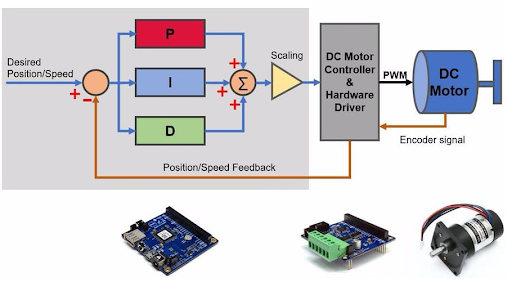
Lịch sử có mặt bộ điều khiển PID
Bắt đầu từ trong những năm 1890 thì bộ điều khiểu khiển PID đã lộ diện ở trong các kiến thiết của cỗ điều tốc. Trong tương lai PID Controller được cách tân và phát triển trên hệ thống tàu thủy từ động.
Sự xuất hiện thứ nhất về có mang PID Controller được phát triển bởi Elmer Sperry năm 1911. Trong tương lai đến năm 1922 Nicolas Minorsky đã xuất bản tác phẩm lý thuyết về bộ tinh chỉnh PID đầu tiên. Trong cuốn sách này đã và đang mô tả có mang PID là gì ? Và tương đối nhiều thông tin mà hiện nay vẫn còn sử dụng.
Lý thuyết này được Minorsky phạt triển phụ thuộc sự quan giáp hành vi của người lái tàu thủy vào khoảng thời hạn này.
Một số cỗ điều khiển trước tiên chính là: khí nén, thủy lực, cơ khí cùng các hệ thống điện cải tiến và phát triển sau chiến thanh quả đât lần 2.
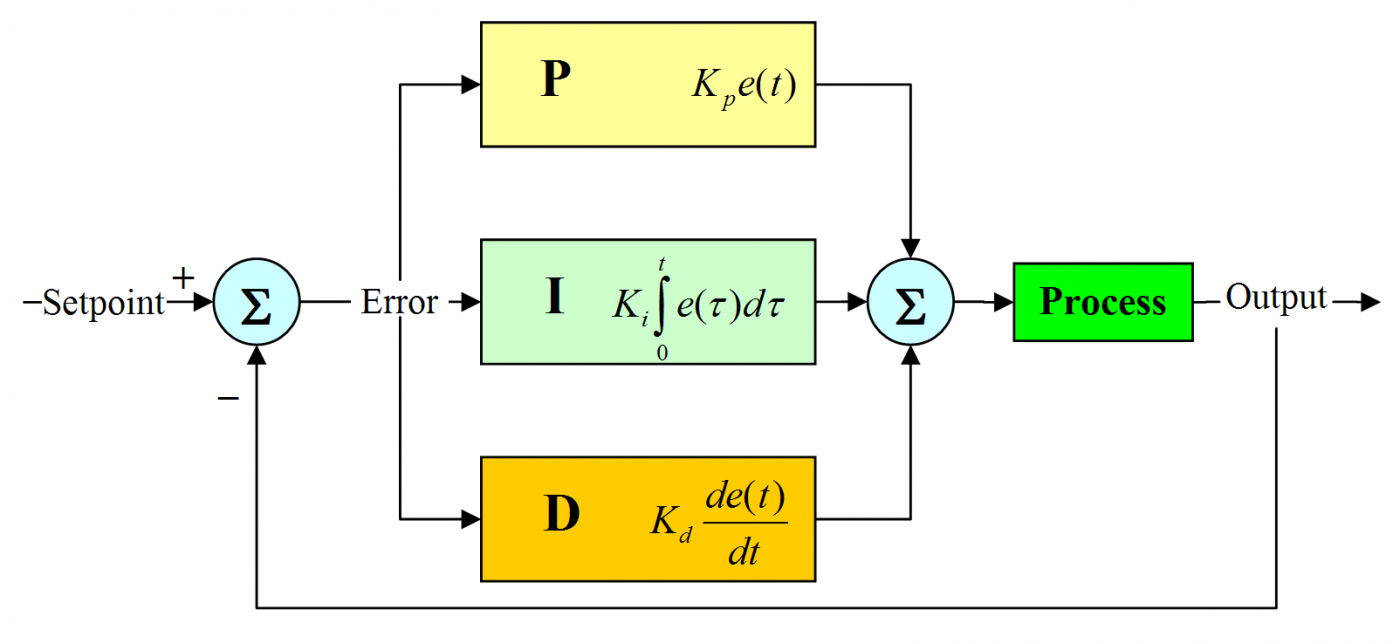
Các khâu hiệu chỉnh PID là gì ?
Sơ đồ hiệu chỉnh PID được chế tạo nên dựa vào 3 khâu, với tổng của 3 khâu này được tạo thành thành bởi những biến điều khiển và tinh chỉnh ( ký hiệu: MV ).
Ta có công thức cụ thể như sau:
MV (t) = P(out) +I(out)+ D(out)
Trong đó: những giá trị P(out), I(out), D(out) chính là các thành phần cổng output của cha khâu điều khiển và tinh chỉnh PID.
1. Khâu tỉ lệ
Khâu tỉ lệ hay nói một cách khác là độ lợi, nó có công suất làm chuyển đổi các quý giá đầu ra, nó tỉ lệ với giá trị sai số hiện tại tại. Để hoàn toàn có thể đáp ứng được tỉ trọng ta rất có thể nhân với thông số tỉ lệ Kp.
Xem thêm: Hướng Dẫn Cách Tiêm Thuốc Cho Gà Đá, Cách Tiêm Thuốc Thú Y Cho Gia Cầm
2. Độ trượt ( Drop )
Trong trường hợp không có nhiễu, thì điều khiển tỉ lệ thuần túy vẫn không có khả năng xác lập ngay lập tức tại giá chỉ trị nhưng nó ước ao muốn. Mà lại nó vẫn có thể bảo trì một sai số bình ổn trạng thái cùng nó được gọi là độ trượt. Nó đó là một hàm của độ lợi tỉ lệ với độ lợi của thừa trình.
Độ lợi sẽ có được tỉ lệ thuận với quy trình và tỉ lệ nghịch cùng với độ lợi của tỉ lệ là một điều tinh giảm không thể tránh khỏi của quy trình điều khiển tỉ trọng thuần túy. Để rất có thể giảm độ trượt người ta thường vẫn thêm một quá số độ lệch.
Dựa bên trên cả thực tế và triết lý thì khâu tỉ trọng vẫn rất quan trọng trong quá trình điều khiển bất chấp độ trượt như thế nào.
3. Khâu tích phân
Hay còn được gọi là khâu reset nó tỉ trọng cả với biên độ không nên số cũng tương tự thời gian xảy ra sai số.
Thừa số tích phân được khẳng định bởi công thức:
4. Khâu vi phân
Biên độ của quá trình phân phối khâu vi phân trên toàn bộ các trạng thái điều khiển và tinh chỉnh đều được giới hạn bởi độ lợi của vi phân Kd.
Tổng kết lại chuyển động ta có: Khâu vi phân, tỉ vệ, tích phân tính tổng chính bằng giá trị áp ra output của bộ tinh chỉnh PID. Cam kết hiệu là u(t)
Ký hiệu thay thế và những dạng PID
Mỗi dạng PID lại sở hữu cho mịnh một dạng ký hiệu khác nhau. Vậy họ hãy cùng cả nhà xem thử ký hiệu cho từng dạng PID này là gì nhé ?
1. Dạng điều khiển PID tiêu chuẩn và lý tưởng
Bộ điều khiển phù hợp nhất để kiểm soát và điều chỉnh thuật toán chính là dạng chuẩn. Trong dạng hình này độ lợi Kp được thực hiện trong khâu Iout cùng Dout.
2. Dạng LaPlace của khối hệ thống điều khiển PI là gì ?
Với cách này ta vừa bao gồm cho mình một cỗ PID bên dưới dạng Palace cùng cả hàm truyền của một hệ thống điều khiển nhằm mục đích xác địch hàm truyền vòng kín của cả khối hệ thống một cách dễ dàng.
3. Dạng nối liền hay tương hỗ
Loại này về cơ bản nó bao gồm toàn bộ khối hệ thống điều khiển PD, PI tiếp nối nhau. Giúp cho những bộ tinh chỉnh và điều khiển kỹ thuật số thời đầu dễ ợt được áp dụng hơn. Sau này, các sản phẩm kế quá thường áp dụng dạng tương hỗ. Cách xác định ở hình phía dưới.
4. Thực hiện tại rời rốc hóa trong bộ PID là gì ?
Một số đối chiếu về xây cất của một bộ PID control kỹ thuật số ở bên trên một vi tinh chỉnh và điều khiển MCU hoặc đồ vật FPGA được yêu cầu ở dạng tiêu chuẩn chỉnh và phải được rời rạc hóa. Khâu tích phân sẽ được rời rộc rạc hóa dựa trên biểu đồ thời hạn mẫu.
Ứng dụng của bộ tinh chỉnh PID là gì ?
Hiện nay PID được vận dụng trong tương đối nhiều ngành nghề không giống nhau. Nó có thể được dùng để làm giảm những sai số, giảm bớt sự xê dịch hay là giảm thời hạn gian xác lập và độ vọt lố…
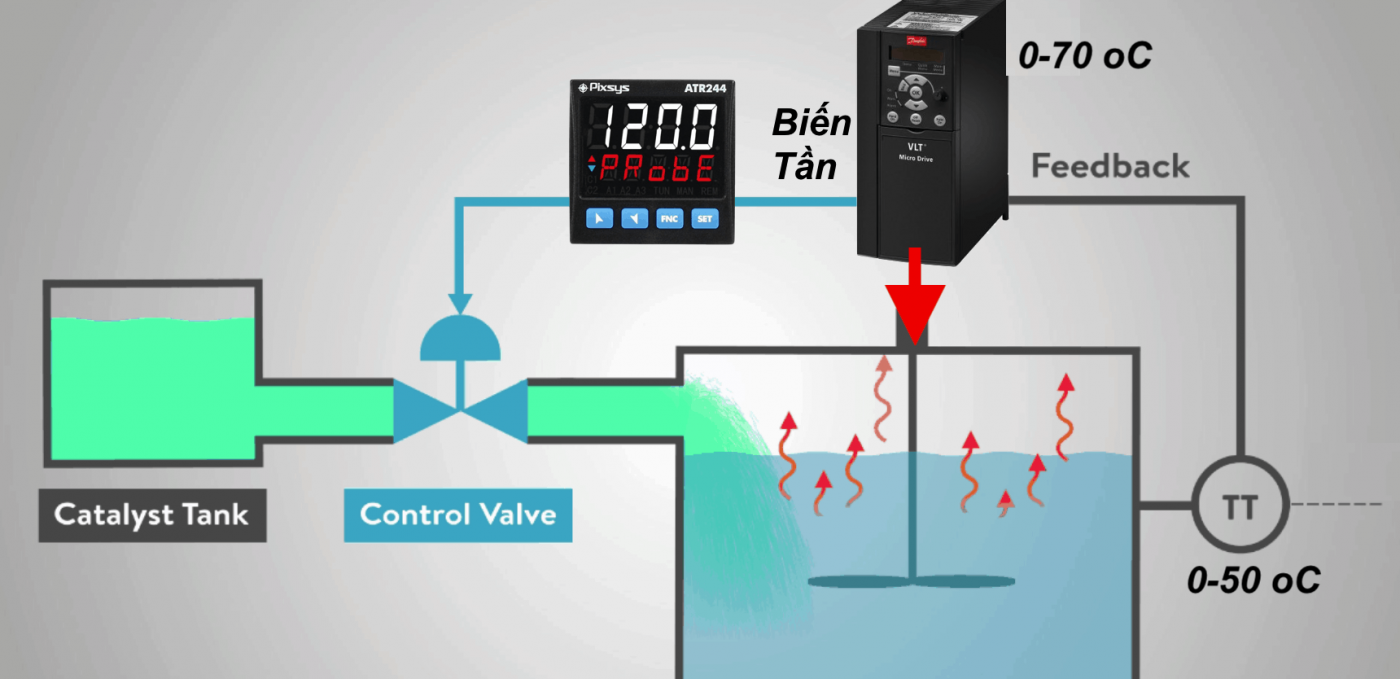
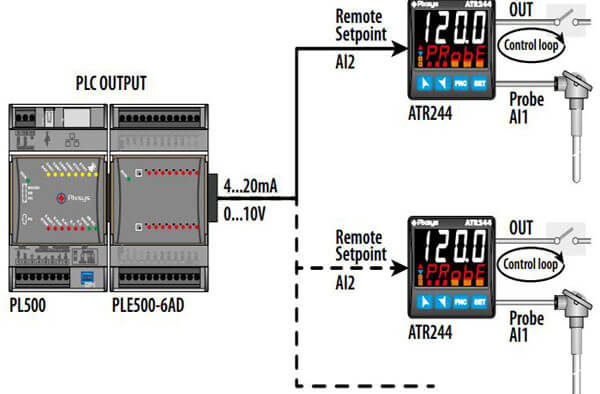
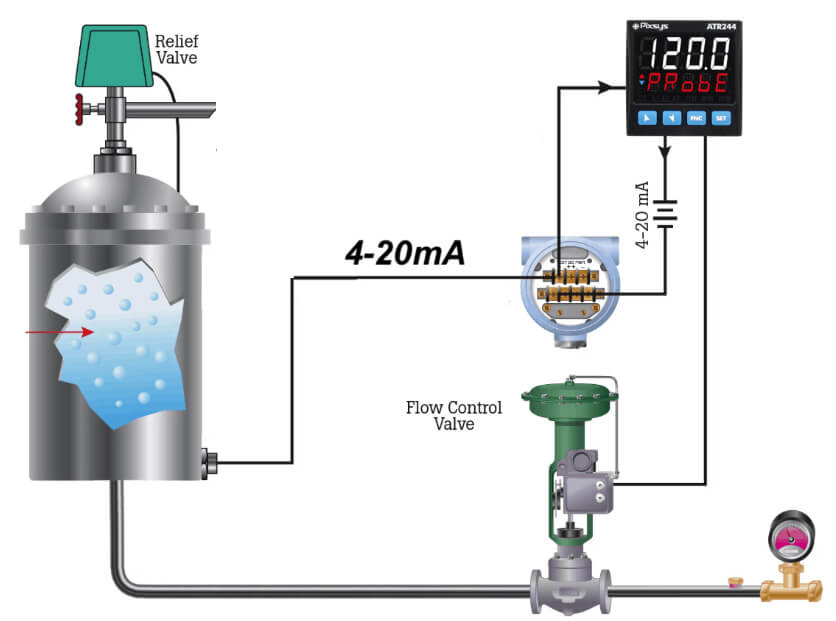
Sử dụng để tinh chỉnh mực nước: bộ tinh chỉnh và điều khiển được tự động hóa hóa nhờ vào vào các thiết bị năng lượng điện tử như cảm biến, van điều khiển…Điều khiển đổi mới tần: những thiết bị điện tử phối hợp ở đây tất cả có: van tinh chỉnh lưu lượng, cảm ứng nhiệt độ, biến chuyển tần điều khiển….Kiểm soát lưu lượng khí qua con đường ốngĐiều khiển PID trong PLC: Ở vào PLC hay sẽ được thiết kế với sẵn những hàm dùng để làm điều chỉnh nhiệt độ, áp suất, lưu lượng….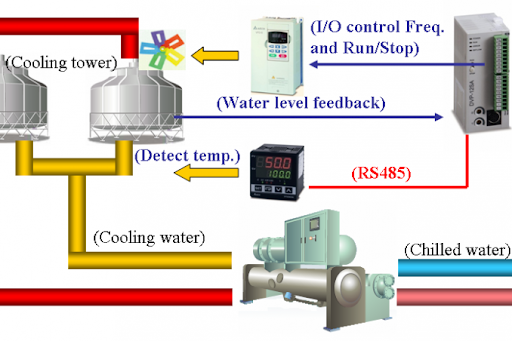
Tổng kết nhằm hiểu hơn về PID là gì ?
Với gần như khái niệm này đôi phần còn hơi hàn lâm, nhưng hy vọng rằng chúng ta cũng có thể đọc đi đọc lại những lần để có thể hiểu rõ rộng về điều đó. Bởi những kinh nghiệm cùng với việc tìm tòi công ty chúng tôi đã đúc rút ra được các nội dung chi tiết nhất để hoàn toàn có thể giới thiệu đến bạn PID là gì ? Những áp dụng và các phương thức xác định cũng như hiệu chỉnh PID.








